Argonav GmbH
Heßbrühlstr. 21D
70565 Stuttgart
E-Mail: info@argonav.de
FORSCHUNGSPROJEKTE
Wir sind Teil verschiedener Forschungsprojekte, die vom BMVI gefördert werden, in denen die Möglichkeiten der Digitalisierung zum Nutzen der Binnenschifffahrt entwickelt und erprobt werden.
Daraus entwickeln sich neue Assistenzsysteme, die den Schiffer bei der Navigation sinnvoll unterstützen.
Aktuelle Forschungsprojekte


autoFerry
Erfassung der Verkehrssituation auf einer Fähre in Küstengewässern (EVeS)
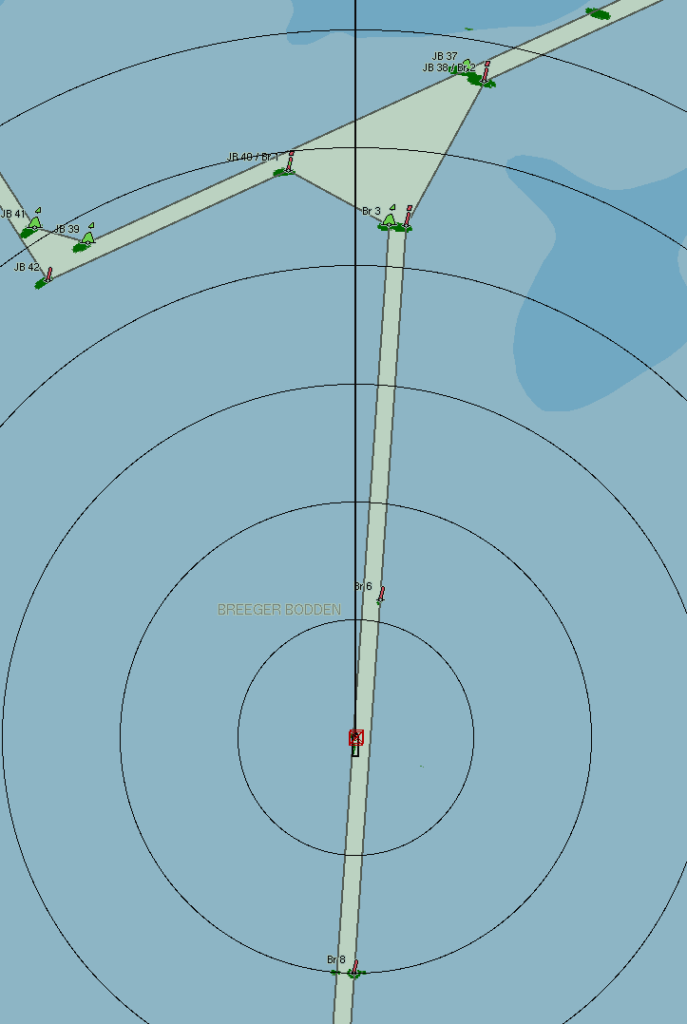
In der Schifffahrt auf Binnenwasserstraßen sind automatisierte Fahrsysteme bereits im Einsatz, allerdings muss bisher bei Begegnungen des automatisiert navigierenden Schiffs mit anderen Schiffen, Kleinfahrzeugen oder Wassersportlern manuell reagiert und eingegriffen werden. Kennzeichnend für die Situation im Binnenbereich, und besonders hier im Bereich der Boddengewässer ist das sehr beengte Fahrwasser, das mögliche Reaktionen deutlich einschränkt. Ziel des hier vorgeschlagenen Projekts ist die demonstrative Automatisierung einer Bestandsfähre der Weißen Flotte Stralsund, der Motorfähre MF Wittow, und deren Betrieb auf der bestehenden Fährverbindung auf Rügen (Fährlinie Wittow) und der neu einzurichtenden Fährverbindung zwischen Rügen (Fährstelle Wittow) und Hiddensee (Vitte). Bei der MF Wittow handelt es sich um eine Autofähre mit Voith-Schneider-Propeller als Antriebseinheiten. Die Fähre soll im Projekt nicht schneller fahren als bisher, dafür aber deutlich energiesparender und sicherer. Die wetterbedingten Ausfälle dieser beiden ÖPNV-Verbindungen sollen durch die Verbesserungen der Steuerkontrolle verringert werden. Die Sicherheit des Begegnungsverkehrs und der Anlegemanöver soll durch die Replizierbarkeit der Manöver und das verzögerungsfreie Reaktionsvermögen des Automationssystem erhöht werden.
Im kompletten Bodden zwischen Rügen und Hiddensee herrscht am zahlreichen Tagen ein sehr dichter Sportschiffverkehr mit sehr engem und flachem Fahrwasser, so dass der automatisierten Verkehrslagenerkennung ein hoher Stellenwert zukommt. Aufgrund von Strömungen kommt es permanent zu Veränderungen des Untergrunds, der im Projekt beobachtet, kartografiert und als Information in die Schiffführung einfließen soll – hierbei spielt neben der Fahrbarkeit des Gewässers auch die Tiefe eine Rolle, da hier mit starken Flachwassereffekten zu rechnen ist, die großen Einfluss auf den Energieverbrauch haben.
Projektpartner dabei sind:
- M. Voith SE & Co. KG Voith
- Weiße Flotte GmbH
- Rheinisch-Westfälische Technische Hochschule Aachen (RWTH), Institut für Regelungstechnik
- Argonav GmbH
Ein Schwerpunkt der Arbeiten der Argonav GmbH Erkennung der Verkehrssituation basierend auf Radar, AIS und KI-basierter Videobildverarbeitung. Neben der reinen Erkennung von anderen Verkehrsteilnehmern ist die Klassifizierung in Kategorien wie Motorboot, Segelboot, Kajak und die Vorhersage Ihrer Bewegung die Aufgabe der Argonav GmbH in diesem Vorhaben.
Das Vorhaben wird gefördert durch Bundesministerium für Wirtschaft und Klimaschutz im Rahmen des maritimen Forschungsprogramms der Bundesregierung.
Mehr zum Projekt, zum Beispiel zu einzelnen Projekttreffen, finden Sie auch in unserem Archiv.
KoliBRI
Kollisionsvermeidung in der Binnenschifffahrt basierend auf Radar und der Integration weiterer Sensorien
Das Projektkonsortium für das Verbundvorhaben „KoliBRI“ hat Anfang Oktober vom Bundesministerium für Wirtschaft und Klimaschutz die Bewilligung für das Projekt erhalten und startet jetzt mit dessen Bearbeitung.
KoliBRI steht für „Kollisionsvermeidung in der Binnenschifffahrt basierend auf Radar und der Integration weiterer Sensorik“.
In diesem Projekt arbeiten die Argonics GmbH, die Argonav GmbH, die Christian-Albrechts-Universität zu Kiel sowie als assoziierter Partner die HGK Ship Management Lux S.à r.l. zusammen.
Übergeordnetes Ziel des Vorhabens ist die Erforschung und Demonstration eines Assistenzsystems für die Binnenschifffahrt, das alle Voraussetzungen des Automatisierungsgrades 3 “Bedingte Automatisierung” nach den Definitionen der ZKR erfüllt. Der Automatisierungsgrad 3 bedeutet die kontinuierliche, kontextspezifische Ausführung aller dynamischen Navigationsaufgaben durch ein automatisiertes Navigationssystem, wobei davon ausgegangen wird, dass der menschliche Schiffsführer auf Anforderungen zum Eingreifen und Systemausfälle angemessen reagiert.
Dieses übergeordnete Ziel umfasst Strategien zur Vermeidung von Kollisionen mit anderen Verkehrsteilnehmern, die sowohl auf einer Anpassung der Sollbahn eines automatischen Bahnführungssystems als auch auf der Anpassung der Geschwindigkeit des eigenen Schiffes beruhen. Das Assistenzsystem soll alle dynamischen Navigationsaufgaben im Kontext der Streckenfahrt selbst ausführen. Der Schiffsführer erfüllt lediglich die Funktion der Rückfallebene für nicht-lösbare Aufgaben sowie mögliche Ausfälle des Systems.
Neben einem solchen nicht-kooperativen Systems soll in einem weiteren Schritt das automatische Bahnführungssystem argoTrackPilot um eine Vernetzung erweitert werden, die im Zusammenspiel mit entsprechenden automatischen Bahnführungssystemen anderer Verkehrsteilnehmer eine kooperative Strategie zur Vermeidung von Kollisionen auf Binnenwasserstraßen ermöglicht.
Die Argonav GmbH bearbeitet in diesem Vorhaben im Bereich der Umgebungserfassung und der Einbeziehung der Karteninformation. Für die Erfassung der Umgebung sollen neuartige Radarsensoren mit Frequenzen im Bereich von 24 GHz genutzt werden, ebenso werden Bilder von Thermal- und optischen Kameras verwendet.
Die vorhandene Karteninformation ist aufzubereiten, mit aktuellen Informationen, z.B. dem Wasserstand, zu kombinieren und den Verarbeitungsmodulen in geeigneter Form zur Verfügung zu stellen.
Daneben ist die Darstellung der Situation und der Planung auf Basis der Inland-ECDIS-Karte eine weitere Aufgabe der Argonav GmbH.
Nach einer Validierung in der Simulation soll das Gesamtsystem auf einem Großschiff installiert und seine Tauglichkeit unter realen Bedingungen unter Beweis stellen.


Abgeschlossene Forschungsprojekte


Fernbin
Ferngesteuertes Binnenschiff
Mit modernen Methoden wird versucht die Binnenschifffahrt konkurrenzfähig zu halten, ihre Effizienz zu erhöhen, die Emissionen zu senken und den Personalbedarf zu reduzieren, denn der Nachwuchs an ausgebildeten Binnenschiffern in Deutschland macht sich rar.
In einem Verbundprojekt, das im Juni 2020 vom Bundesministerium für Wirtschaft und Energie (BMWi) bewilligt wurde, untersucht die in-innovative-navigation GmbH mit einer ganzen Reihe von Partnern die Möglichkeiten des koordinierten, ferngesteuerten Fahrens von Binnenschiffen
Die Bedien- und Anzeigemöglichkeiten zur Steuerung eines Binnenschiffs werden in einem Fernsteuerstand an Land zu realisiert. Durch eine entsprechende Ausstattung des Schiffs mit Sensorik gilt es zu erreichen, dass auch im Fernsteuerstand alle notwendigen Informationen über das Schiff und seine Umgebung zur Verfügung stehen. Ferner müssen die Ruder, der Antrieb und die übrigen Steuerungseinrichtungen sowie die Signalisierungs- und Kommunikationseinrichtungen fernbedienbar werden. Die sichere Datenübertragung zwischen Schiff und Fernsteuerstelle an Land ist dabei ein sehr wichtiger Punkt. Der Schiffsführer im Fernsteuerstand wird bei seinen Aufgaben durch verschiedene Assistenzfunktionen entlastet. So reduziert eine automatische Bahnführung die Häufigkeit der Steuereingriffe signifikant. Eine Kollisionswarnung warnt ihn rechtzeitig vor gefährlichen Situationen.
Als zusätzliches Element wird eine Leitstelle für den Verkehr auf der Wasserstraße verwirklicht. An diesem Leitstand hat man den gesamten Verkehr auf der Wasserstraße und deren Umgebung im Blick. Der gegenseitige Austausch von Informationen zwischen Fernsteuerstand, z.B. mit der aktuellen Bahnvorgabe des ferngesteuerten Schiffs, der Leitstelle mit der globalen Verkehrslage und ihrer Prädiktion, ermöglicht über die Fernsteuerung eines Schiffes hinaus eine umfassende digitale Vernetzung der Verkehrsteilnehmer auf der Wasserstraße.
Die Argonav GmbH bearbeitete im Rahmen von Fernbin sämtliche bordseitigen Aufgaben im Unterauftrag der in-innovative navigation GmbH.
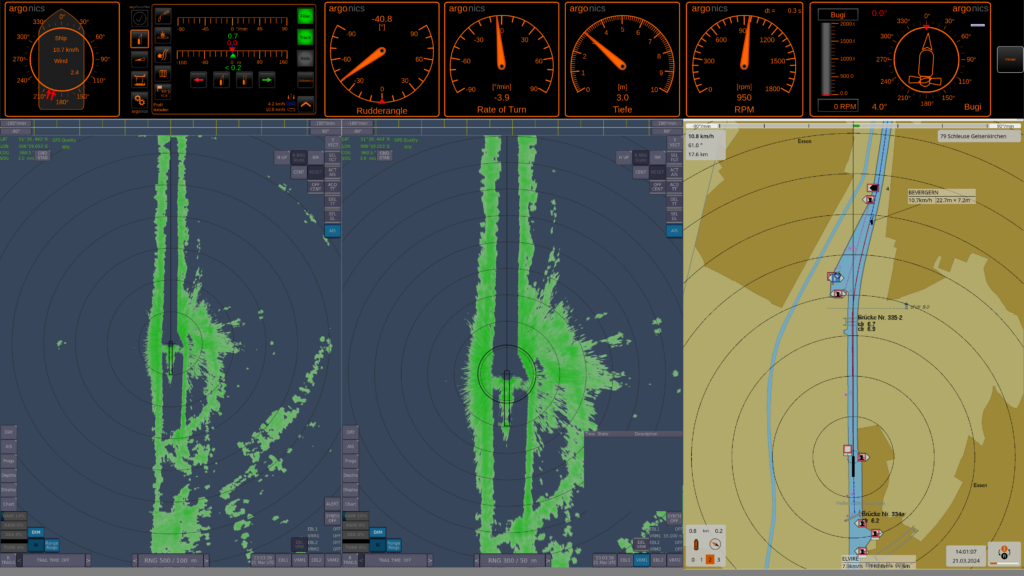
Am 21.3.2024 wurden die Ergebnisse des Projekts FernBin (Ferngesteuertes, koordiniertes Fahren in der Binnenschifffahrt) in Duisburg der Binnenschifffahrtsgemeinschaft zu präsentiert.
Weitere Informationen zum Projekt finden Sie unter https://www.fernbin.de/und https://lnkd.in/eNXznG62
SciPPPer
Schleusenassistenzsystem basierend auf PPP und VDES für die Binnenschifffahrt
Ziel des Verbundprojektes SciPPPer ist die Entwicklung eines Fahrerassistenzsystems für die Automatisierung der Schleusenfahrt von Binnenschiffen.
Technologische Basis für die neue Fahrerassistenzfunktion ist die Bereitstellung von zuverlässigen und hochgenauen Informationen zur Position, Lage und Geschwindigkeit des Binnenschiffes.
Einerseits soll dafür hochgenaue Satellitennavigation verwendet werden. Die hierfür notwendigen Korrekturdaten sollen über das neuartige VHF Data Exchange Systems (VDES) zur Verfügung gestellt werden. Der VDE Datenkanal ist Bestandteil des neuen VHF Data Exchange Systems (VDES). Eine deutliche Reduktion in der Datenübertragungsrate kann durch die Nutzung des Precise Point Positioning (PPP) Verfahrens erreicht werden.
Andererseits soll die Positions- und Lagebestimmung durch den Einsatz von geeigneten Nahbereichssensoren wie Laserscannern (Lidar) verbessert und und robuster gegen Störeinflüsse gemacht werden.
Für das hochgenau Manövrieren vor und in der Schleuse soll ein Regelungssystem entwickelt werden, das die üblicherweise vorhandenen Stellgrößen wie Bugstrahl, Ruder und Maschinendrehzahl für eine Mehrgrößenregelung nutzt.
Das Projekt wird vom Bundesministerium für Wirtschaft und Energie (BMWI) im Rahmen der maritimen Forschungsstrategie 2025 und des maritimen Forschungsprogrammes gefördert. Die inhaltliche Zielstellung des Programms orientiert sich an den Querschnittsthemen:
MARITIME.smart – Maritime Digitalisierung und smarte Technologien
MARITIME.safe – Maritime Sicherheit.
MARITIME.smart – Maritime Digitalisierung und smarte Technologien
MARITIME.safe – Maritime Sicherheit.
Weitere Informationen finden Sie hier.


AKOON
Autonom fahrende Fähre am Rhein
Innerhalb des Forschungsvorhabens AKOON, Automatisierte und koordinierte Navigation von Binnenfähren, soll im Rahmen des BMWI-Förderprogramms „Maritime Technologien der nächsten Generation“ eine Rheinfähre vollautomatisiert werden. Dies beinhaltet neben der Überfahrt auch das An- und Ablegen am Fähranleger.
Versuchsträger im Forschungsprojekt AKOON ist die Fähre „Horst“ der Rheinfähre Maul, die in der Nähe von Mainz zwischen den Ortschaften Oestrich-Winkel und Ingelheim verkehrt. Mit über 600.000 transportierten Personen und 300.000 transportierten Fahrzeugen im Jahr stellt diese Fährverbindung einen unverzichtbaren Teil der Verkehrsinfrastruktur in der Region dar.
Aufgrund enger Passagen, Sandbänken und starker Strömung gilt das Fährgebiet als besonders anspruchsvoll, insbesondere bei niedrigen Pegelständen, wie sei erst kürzlich im Sommer und Herbst 2018 auftraten. Derart schwierige Bedingungen bringen die Fährführer der Rheinfähre bis an die Grenze ihrer Leistungsfähigkeit, weshalb der automatisierte Betrieb von Binnenfähren das Fährpersonal insbesondere in solchen Ausnahmesituationen entlasten kann.
Durch eine intelligente Routenplanung und optimierte Ansteuerung der Antriebseinheiten, bestehend aus vier Voith-Schneider-Propellern, sollen Treibstoffverbrauch reduziert und Sicherheit erhöht werden. Die Routenplanung benötigt umfassende Informationen über die aktuelle Verkehrssituation auf dem Rhein, die durch Kombination verschiedener Sensoren zuverlässig bereitgestellt werden kann.
Das Forschungsprojekt soll die Grundlagen für die Vollautomatisierung in der Binnenschifffahrt legen und als Technologietreiber fungieren. Kommende Entwicklungen im Bereich der Schiffsassistenzsysteme, insbesondere im Bereich der Binnenschifffahrt sollen künftig aus dem Projekt abgeleitet werden.